Automatické řízení je klíčovou součástí mnoha průmyslových provozů a představuje inspirující, všudypřítomný, důležitý a zábavný obor. Tento předmět se zabývá logickým a spojitým řízením dynamických systémů a seznamuje studenty s hlavními pojmy z automatizace a řídicích systémů.
Základní kurz automatického řízení seznámí studenty se základními pojmy a vlastnostmi dynamických systémů z různých oblastí, jako jsou fyzikální, inženýrské, biologické, ekonomické, robotické a informatické. Vysvětlí, jak lze pomocí zpětné vazby měnit chování systémů a potlačit vliv neurčitosti. Představí klasické i moderní metody analýzy a návrhu automatických řídicích systémů.
První část kurzu se zaměřuje na logické řídicí systémy. Uvádí logické funkce, logické prvky a kombinační a sekvenční logické obvody. Důraz je kladen na minimalizaci logických funkcí, zejména s použitím Karnaughových map. Studenti se seznámí s logickými funkcemi NAND a NOR, kombinačními a sekvenčními logickými obvody a programovatelnými automaty.
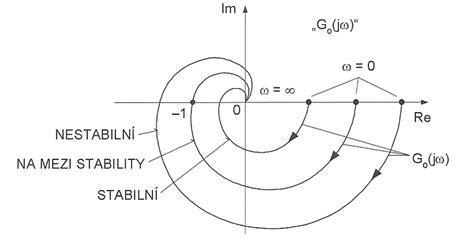
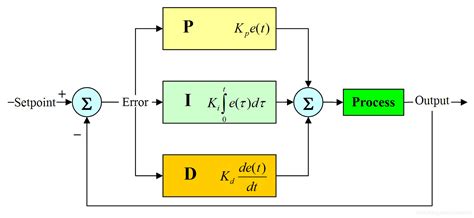
Druhá část kurzu obsahuje základní poznatky z lineárních spojitých řídicích systémů. Řeší problémy analýzy prostřednictvím impulsních a přechodových funkcí a frekvenčními metodami. Matematickým základem je Laplaceova transformace. Důležitou částí je základní teorie zpětnovazebních systémů, včetně vyšetřování jejich stability, přesnosti a kvality regulace. Studenti se naučí analyzovat spojitý regulační obvod, pracovat s Laplaceovou transformací, matematicky popisovat regulační systémy, řešit diferenciální rovnice a pracovat s přenosem. Budou se zabývat impulsní a přechodovou funkcí a charakteristikou, dělením regulačních členů, frekvenčním přenosem a frekvenčními charakteristikami v komplexní rovině a logaritmických souřadnicích, póly a nulami a blokovou algebrou. Dále se proberou dopravní zpoždění systémů, regulátory a jejich dynamické vlastnosti, stabilita regulačního obvodu obecně a kritéria stability, přesnost regulace v ustáleném stavu a kaskádní regulace. Studenti se také naučí nastavit regulátory a aplikovat Ziegler-Nicholsovu metodu.
Třetí část kurzu zahrnuje základy diskrétního řízení. Matematickým základem je Z-transformace a diferenční rovnice. Základní popis systémů jsou impulsní a přechodová funkce. Otázky stability jsou řešeny např. pomocí kritérií stability diskrétních regulačních obvodů. Studenti se naučí pracovat s diskrétním regulačním obvodem, vzorkovačem, tvarovačem, Z-transformací a diferenčními rovnicemi. Budou se zabývat Z-přenosem, diskrétní impulsní a přechodovou funkcí a charakteristikou, frekvenčním přenosem a frekvenční charakteristikou diskrétních systémů. Dále se proberou bloková algebra diskrétních systémů, číslicové regulátory (polohový a přírůstkový algoritmus) a stabilita diskrétního regulačního obvodu obecně.
Předmět klade důraz na praktické zvládnutí látky. Laboratoř automatického řízení, umístěná v hlavní budově fakulty strojní, slouží k experimentální výuce. Obsahuje laboratorní úlohy z oblasti logického, analogového a diskrétního řízení, které jsou řízeny pomocí průmyslových řídicích automatů nebo PC. Pomocí virtuální laboratoře je možné simulovat chování reálné soustavy a dokonce i on-line řídit vybrané reálné laboratorní úlohy.

V rámci předmětu se studenti seznámí s:
- Úvodem do automatizace.
- Logickým řízením (Booleova algebra, algebraická minimalizace logické funkce, bloková schémata, seznámení se Siemens LOGO!Soft).
- Kombinačními a sekvenčními logickými obvody a jejich simulací.
- Úvodem do Simulinku.
- Spojitým lineárním řízením (diferenciální rovnice, přenos, impulsní a přechodová funkce, simulace v Matlabu).
- Frekvenčním přenosem a charakteristikami.
- Blokovou algebrou, regulátory a stabilitou.
- Diskrétním řízením (Z-transformace, diferenční rovnice, stabilita).
Jak začít s řídicími systémy v MATLABu
Pro úspěšné absolvování předmětu je nezbytná aktivní účast na všech laboratorních cvičeních a zpracování elaborátů podle pokynů učitele. Zkouška je písemná a ústní. V písemné části student shrnuje dvě základní témata a řeší dva příklady. Ústní část zkoušky obsahuje diskuzi o těchto úlohách a možné doplňující otázky.
Základní znalosti matematiky, včetně řešení systémů obyčejných diferenciálních rovnic, jsou pro studium předmětu nezbytné. Doporučená literatura zahrnuje:
- Gene F. Franklin, J. David Powell, Abbas Emami-Naeini: Feedback Control of Dynamic Systems.
- Richard C. Dorf and Robert H. Bishop: Modern Control Systems.
Obě knihy jsou k dispozici ve fakultní knihovně.
Teorie automatického řízení II se soustředí na lineární časově invariantní systémy (LTI) bez zpoždění s obecným stupněm volnosti ve stavovém prostoru a na syntézu stavových řídicích členů. Nelineární řídicí systémy jsou rovněž zmíněny.
Klasická teorie řízení se zaměřuje na lineární časově invariantní systémy (LTI) bez zpoždění s jedním stupněm volnosti v přenosovém tvaru a na syntézu PID regulátorů.
tags: #teorie #automatickeho #rizeni #cvut